SIC184 - Precyzyjna kontrola ruchu silnika krokowego

Serwonapędy to jedne z podstawowych elementów wykonawczych stosowanych w automatyce. Dzięki pracy w zamkniętej pętli sprzężenia zwrotnego, są stosowane wszędzie tam, gdzie potrzebna jest duża dynamika ruchu, pozycjonowanie, praca na bardzo małych prędkościach, duże dokładności regulacyjne czy precyzyjne przemieszczanie z jednej pozycji do drugiej. Obecnie jako serwonapędy stosuje się najczęściej silniki synchroniczne prądu zmiennego AC lub prądu stałego BLDC. Niejednokrotnie są to niestety rozwiązania dość kosztowne lub nie zawsze pokrywające się z wymaganiami aplikacji. Alternatywą dla takich rozwiązań jest silnik krokowy sterowany ze sterownika PLC i „końcówki mocy” lub dedykowanego kontrolera ruchu.
Budowa i zasada działania serwonapędu
Serwonapęd to nic innego jak silnik prądu stałego lub zmiennego, który w połączeniu z dedykowanym sterownikiem oraz elementem odczytującym rzeczywistą prędkość obrotową czy pozycję silnika (np. enkoder) pozwala w dokładny sposób wykonać określoną ilość obrotów z zadaną prędkością i przyspieszeniem. Jest to możliwe dzięki pracy w tak zwanej zamkniętej pętli regulacji.
Serwonapęd składa się z następujących członów:
- Urządzenia wykonawczego nazywanego często serwosilnikiem, np. silnik synchroniczny AC,
- Regulatora/sterownika nazywanego serwokontrolerem – realizującego określony algorytm sterujący silnikiem (np. PID, kontrola prędkości, prądu, momentu, pozycji) na podstawie parametrów zadanych oraz odczytanych z elementu sprzężenia zwrotnego,
- Elementu sprzężenia zwrotnego - służącego do odczytu aktualnej pozycji czy prędkości elementu wykonawczego (silnika) - zazwyczaj jest to enkoder, rezolwer lub tachometr.
Zadaniem regulatora jest tak wysterować silnikiem, na podstawie danych z elementu pomiarowego (np. enkodera), by uzyskać wymagany efekt - np. przemieszczenie wału silnika o konkretny kąt, uzyskanie zadanej liczby obrotów lub prędkości wału silnika. W zależności od zastosowanej metody algorytmu regulacji, silnik może utrzymywać zadaną pozycję, prędkość obrotową czy moment niezależnie od zakłóceń (np. obciążenie wału silnika, spadek napięcia zasilania).
Silnik krokowy jako alternatywa dla serwonapędu
Silniki krokowe zyskały sporą popularność w układach napędowych, głównie dzięki nieskomplikowanej budowie, dużym momentom wyjściowym bez przekładni i prostemu sterowaniu. Mimo gorszych parametrów ruchu w wielu układach z powodzeniem mogą konkurować z serwonapędami DC czy znacznie lepszymi pod względem parametrów ruchu nowoczesnymi serwonapędami AC / BLDC, a w niektórych przypadkach są nawet niezastąpione. Obecnie najbardziej popularne są silniki krokowe hybrydowe (Rys.1)
 |
| Rys. 1 Silnik krokowy hybrydowy |
Największymi zaletami silnika krokowego jest duży moment oraz sposób jego sterowania, który umożliwia zadanie prędkości czy pozycji silnika z dokładnością do ułamków stopni bez stosowania dodatkowych elementów sprzężenia zwrotnego jak np. enkoder.
W silniku krokowym, podawane na uzwojenia impulsy powodują, że wirnik nie obraca się ruchem ciągłym, lecz wykonuje za każdym razem skok o ściśle ustalonym kącie. Dla typowych silników jest to 1,8 stopnia. Dzięki temu kąt obrotu wirnika jest zależny od liczby dostarczonych impulsów, a prędkość jest równa częstotliwości podawania tych impulsów.
Silnik krokowy do poprawnej pracy wymaga zastosowania sterownika mocy do zadawana impulsów prądowych na jego uzwojenia. Nowoczesne sterowniki silników krokowych pozwalają pracować w trybie „mikrokrokowym” dzieląc podstawowy skok (krok) silnika na mniejsze wartości. Przykładowo sterownik silnika krokowego z podziałem kroku 1/256 pozwala na ustalenie pozycji wału silnika z dokładnością do 360/200/256 -> 0,007 stopnia! bez dodatkowych elementów kontrolujących pozycję jak np. enkoder.
Silniki krokowe charakteryzują się mniejszą prędkością obrotową niż silniki komutatorowe i bezszczotkowe, jednak znacznie większym momentem, a także dość dużą dynamiką ruchu. Dla silnika krokowego trzymanie pełnym momentem przy zerowej prędkości jest stanem normalnym, a nie zabronionym stanem zwarcia, jak dla innych typów silników.
Użyteczna prędkość dla silnika krokowego zamyka się w wartości do około 500 [obr/min], gdzie dla tych prędkości moment obrotowy jest czasami kilkukrotnie wyższy niż w przypadku innego typu silników.
Dzięki sporym momentom i mniejszym prędkościom obrotowym silniki krokowe często zastępują napędy złożone z serwonapędu i przekładni pracującej z małymi prędkościami obrotowymi.
Precyzyjna kontrola ruchu silnika krokowego
Silnik krokowy do pracy wymaga zastosowania sterownika mocy silnika krokowego (końcówka mocy) oraz urządzenia zadającego sygnały ruchu typu Krok/Kierunek. Urządzeniem zadającym te impulsy może być prosty generator sygnału prostokątnego, sterownik PLC z wysokoczęstotliwościowymi wyjściami, lub dedykowany generator trajektorii ruchu.
 |
| Rys. 2 Programowalny sterownik silnika krokowego SIC184. |
Firma WObit w swojej ofercie posiada sterownik SIC184, który łączy w sobie zarówno sterownik mocy jak i programowalny generator trajektorii z indekserem, pozwalający realizować dowolny ruch silnika, a także może spełniać rolę małego sterownika PLC, wykonując program ze swojej pamięci.
 |
| Rys. 3 Sterownik SIC184 jako kompleksowe rozwiązanie w sterowaniu silnikiem krokowym. |
Sterownik SIC184 pozwala na całkowite wyeliminowanie sterownika PLC i bezpośrednie sterowanie silnikiem krokowym o mocy do 4A. Jeśli wbudowany sterownik mocy okaże się za słaby dla stosowanego silnika można podłączyć zewnętrzny sterownik o większej mocy lub np. dwa sterowniki sterujące równolegle pracującymi dwoma silnikami.
Wbudowany w SIC184 kontroler trajektorii umożliwia precyzyjne zadanie pozycji, prędkości i przyspieszenia ruchu silnika. Użytkownik może dowolnie dobrać parametry tzw. „rampy”, by uzyskać optymalne warunki pracy silnika dla danej aplikacji (Rys. 6).
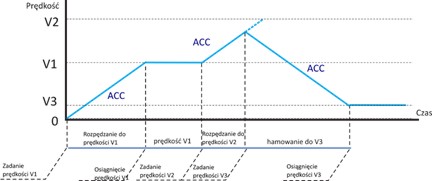 |
| Rys. 6 Przykład trajektorii ruchu generowanej przez sterownik SIC184 |
Sterownik mocy wbudowany w SIC184 pozwala na sterowanie silnikiem krokowym z podziałem kroku do 1/64. Umożliwia to ustalenie pozycji wału silnika z dokładnością 0,028 stopnia oraz pracę w szerokim zakresie prędkości od 0 (minimalna prędkość obrotowa 0,048 [obr/min]) do 5400 [obr/min].
Sterownik umożliwia zaprogramowanie do 1000 komend ruchu, co pozwala na realizację nawet skomplikowanych zadań ruchu, a dodatkowe wejścia i wyjścia cyfrowe pozwalają na sterowanie zewnętrznymi urządzeniami. Ponadto sterownik może współpracować z enkoderem inkrementalnym, co pozwala na jeszcze większą kontrolę pozycji silnika krokowego.
Sterowanie wieloma napędami
W automatyce często zachodzi konieczność sterowania kilkoma napędami jednocześnie, gdzie najczęściej ruchy poszczególnych napędów muszą być ze sobą zsynchronizowane.
Sterownik SIC184 wyposażony jest w popularny interfejs RS485 MODBUS-RTU, który pozwala komunikować się z innymi urządzeniami na tej magistrali, będąc wówczas urządzeniem podrzędnym (SLAVE). Sterowniki mogą być adresowane w zakresie 1-32, co pozwala na jednoczesne sterowanie do 32 silników krokowych z urządzeń takich jak sterowniki PLC czy panele operatorskie HMI. Otwarty protokół komunikacyjny MODBUS-RTU pozwala także na sterowanie z własnych aplikacji tworzonych na PC i urządzeń sterujących.
Programowanie sterownika SIC184
Programowanie sterownika odbywa się z poziomu prostej aplikacji SIC-Konfigurator. Programowanie polega na wprowadzaniu w języku tekstowym, zwanym WBL (Wobit Basic Language), prostych komend np.: „PABS 10” (ruch na pozycję absolutną 10) lub „SET OUT2= ON” (włączenie wyjścia OUT2).
Język ten dzięki prostym komendom tekstowym pozwala w intuicyjny i szybki sposób tworzyć programy dla sterownika. Z poziomu stworzonego programu możliwe jest dowolne sterowanie ruchem napędu, sterowanie uniwersalnymi wyjściami, reakcja na wejścia, zliczanie impulsów z enkodera, funkcje opóźnień czasowych, proste operacje matematyczne, operacje na zmiennych dostępnych przez rejestry MODBUS itp.
 |
| Rys. 8 Wygląd aplikacji SIC-Konfigurator do tworzenia programów ruchu sterownika SIC184. |
Sterownik SIC184 wyposażony jest dodatkowo w złącze USB, które pozwala na podłączenie sterownika bezpośrednio do komputera PC. Dodatkowe oprogramowanie SIC184-KONFIGURATOR daje możliwość konfiguracji sterownika i jego szybkiej diagnostyki (kontrola sygnałów wejść/wyjść, pracy sterownika „online” itp.), a także bezpośredniego zadawania komend ruchu. Oprogramowanie to pozwala także zaprogramować sterownik komendami ruchu stworzonymi w środowisku SIC-Konfigurator.
wróć na stronę główną