Robot Tower firmy WObit

Szybkie i powtarzalne przenoszenie elementów, pakowanie czy paletyzacja to codzienne zadania w różnych branżach przemysłu. Firma WObit do wypełniania takich zadań proponuje roboty typu Tower własnej produkcji.
W zależności od potrzeb aplikacji WObit proponuje dwa rodzaje robota: TR300 i TR1200. Robot TR300 ma cztery stopnie swobody pozwalające na efektywną realizację złożonych ruchów.
Podstawa robota jest wyposażona w wysokiej jakości przekładnię cykloidalną, pozwalającą na przenoszenie dużych momentów obrotowych oraz skrętnych. Na przekładni zainstalowano układ ruchu pionowego, wykorzystujący napęd śrubowo-toczny.
|
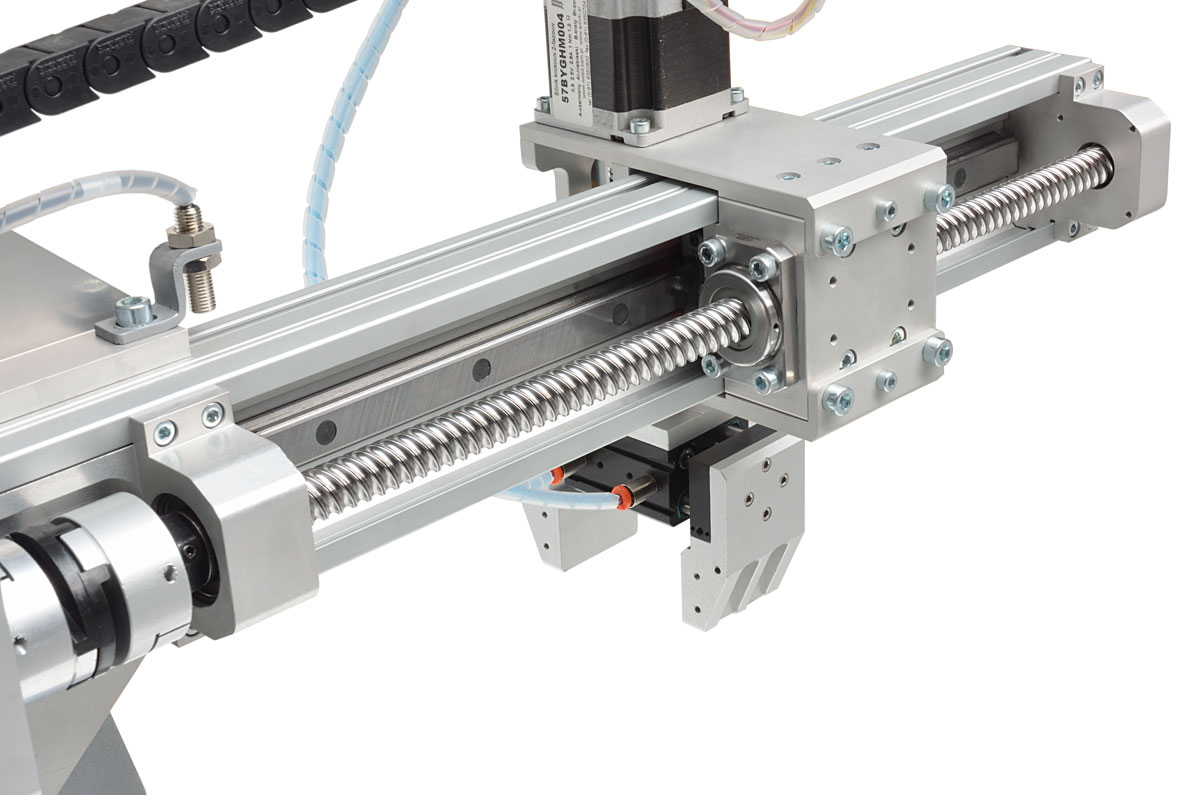
Konstrukcja ramienia robota, oparta o moduł MLAS16, umożliwia uzyskanie wysokich prędkości ruchu. Wszystkie osie robota napędzane są wysokowydajnymi silnikami serwo, które wraz z wysokiej jakości układem mechanicznym zapewniają dobrą powtarzalność pozycjonowania. Odpowiedni montaż przewodów robota pozwala na uzyskanie ruchu w zakresie 360° wokół własnej osi. |
 |
TR300 może przenosić ładunki o łącznej masie do 15 kg, przy maksymalnym zasięgu 500 mm (standardowy zasięg wynosi 300 mm). W przenoszonej masie należy uwzględnić masę chwytaka zastosowanego w aplikacji. Układ ruchu chwytaka wyposażony jest w napęd pozwalający na realizację jego obrotu wokół własnej osi. Możliwe jest zastosowanie wymiennika narzędzi, umożliwiającego szybką wymianę chwytaka w trybie ręcznym lub automatycznym. Konstrukcja ta pozwala na zamontowanie dowolnego typu chwytaka.
Sterowanie i oprogramowanie
Sterowanie robota umieszczone jest w oddzielnej szafie sterującej. TR300 jest programowany z wykorzystaniem środowiska WBCprog instalowanego na komputerze klasy PC, z systemem Windows. Do kontrolera robota, za pośrednictwem portu RS485 można podłączyć panel HMI i komunikować się z nim w protokole Modbus-RTU, co zwiększa funkcjonalność robota.
Przykładowo w kontrolerze może działać uogólniony program kontroli ruchu, a panel operatorski może przekazywać wartości poszczególnych zmiennych, opcjonalnie również aktywować lub dezaktywować wybrane części programu. Taki sposób współpracy pomiędzy kontrolerem oraz panelem HMI pozwala na tworzenie niemalże dowolnej ilości konfiguracji trajektorii ruchu.
Dodatkowe wyposażenie
Robot może zostać dodatkowo wyposażony w różnorodne czujniki lub system wizyjny. Do komunikacji kamery wizyjnej z kontrolerem robota można wykorzystać protokół Modbus-RTU. Dzięki współpracy z kamerą robot może otrzymywać informacje o położeniu obiektu i jego orientacji, który ma zostać pobrany.
 |
Możliwa jest również identyfikacja wymiarów, a także odczyt kodów kreskowych. Kamera systemu wizyjnego może zostać zamontowana na ramieniu robota, jednak preferowane jest jej umiejscowienie w stałym punkcie, pozwalającym na obserwację wybranego pola ze stałym parametrem oświetlenia. Poza standardową konstrukcją robota TR300 dostępna jest również wersja wzmocniona do przenoszenia większych obciążeń, a także wersja TR300-200-ML.12H, w której osi robota mogą być dodatkowo osłonięte, chroniąc konstrukcję przed dostępem zanieczyszczeń. |
Konstrukcja robota może być przystosowana do posadowienia jej na układzie jezdnym, opartym o prowadnice liniowe oraz napęd wysokoprecyzyjnej listwy zębatej. Dzięki temu robot zyskuje dodatkową oś ruchu, wzdłuż której może przemieszczać się z ładunkiem, na niemalże dowolnym dystansie.
Poza robotem TR300 do aplikacji wymagających przenoszenia większych obciążeń oraz zakresu ruchu WObit proponuje model TR1200. Robot ten może przenosić ładunki o łącznej masie do 100 kg, przy maksymalnym zasięgu 1200 mm. Obok robotów Tower w ofercie WObit są dostępne roboty typu desktop, dwa typy robota SCARA, robot AGV oraz różnorodne konfiguracje robotów kartezjańskich w wersjach: ekonomicznej, precyzyjnej oraz o wysokiej dynamice.
wróć do listy artykułówwróć na stronę główną